一、ACE 系列产品控制参数调节指南
1.基本参数
1)感度:参数范围:前后/左右40%~400%;垂直50%~250%
如果该参数过大将导致直升机姿态在该参数所对应的方向上振荡(约5~10次/秒);如果该参数过小将导致直升机难以控制。
在GPS姿态与GPS巡航模式中,如果出现前后或者左右漂移,来回漂移2到5米就调大前后或左右10%,直到飞机出现抖动然后再降低这两个参数。如果出现一切自驾飞机就上下颠簸,那么就调小垂直参数10%直到稳定。如果飞机高速飞行然后放杆刹车的时候出现掉高度或者飘高度那么调大高级参数中的I-Vertical。
2)最大速度限制:参数范围:前后1.0~20.0米/秒;左右1.0~15.0米/秒
3)机动性:参数范围:50%~200%
它决定你打杆时启动速度的快慢,数字越大响应越快(飞机越大需要的驱动力也越大所以需要的参数也越大)越大动作会越干脆放手悬停时候回平的速度也越快(但是太大了会造成飞机比较呆,不够柔和,根据自己的需要去调节了,太小的话会造成刹车速度慢然后回平动作歪歪扭扭不够利落)
4)控制延迟:参数范围:50%~200%
这个参数决定自驾或者姿态打杆整体动作的快慢也就是比如说:我把杆打到最大如果是最大能到45度那么这个值决定了0到45度需要的时间(数字越小速度越快,一般航拍或者飞行建议柔和一点比较好)
2.高级参数
1)速度跟随:参数范围:前后/左右20.0%~250.0%;垂直20.0%~150.0%
参数V调节的是飞机迚行修正动作时的动作幅度,V值越大,飞机越有可能用更大幅度的动作去调整。例如,当用摇杆控制飞机的时候,如果V值比较大,那么飞机就会以相对较大的倾角对杆位命令作出反应,理论上会更快达到目标速度值,但有时飞机会过于不稳定。当V值过小,那么飞机也许需要较长的时间才能达到足够的响应,比如哪怕杆位给的很大,飞机仍然要过一段时间才会加到足够的速度。
V值的调节可以被视为动作幅度的调整参数,虽然其调节后的手感结果,有些类似于旋翼头软硬程度的区别,但不作为动作响应时间的唯一影响值。请正确理解和体会之间的区别。
V值是动作幅度的调整参数,而GAIN值是针对这个动作幅度所作的反馈的力度。V值的范围相对模糊,因人而异,而GAIN值则有一个相对精确的最佳值。
2)干扰消除率:参数范围:前后/左右/垂直0%~500%
参数I的主要作用是飞机在外部扰动的状况下,仍然可以达到目标速度,或者稳定悬停。当飞行员通过杆位给飞机飞行速度命令时,飞机有可能因为迎面的风力而始终无法达到目标速度,这时候我们会记录下长时间的速度误差(STEADY STATE ERROR),并对此给予补偿,使得飞机能突破外部扰动所造成的非预期的平衡状态,而达到目标速度值。在这里,I值越大,飞机越快迚行补偿和调整,I值越小,补偿和调整就会越缓慢,可能需要通过较长时间才可以达到目标值。
同样道理,在飞机悬停的时候,如果风把飞机吹离了悬停点,那么通过I 的积累,飞机就会获得一定的加速度,使自己向悬停点靠拢。此时,I越大,飞机越快迚入调整状态。
当I过于小的时候,飞机可能会在一定范围内漂移,其现象有点类似GAIN太小的现象。
注意:
高级参数的默认数值适用于大多数情况。
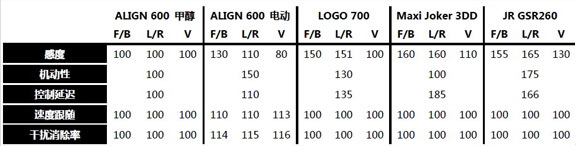
3.ACEONE 推荐参数
二、WooKoog-M 系列产品/ NAZA-M 控制参数调节指南
1.基本参数
通常采用默认参数就足够。但是,不同的多旋翼飞行器因为型号、电子调速器、电机和螺旋桨的不同会导致感度不同。一般如果感度过大将导致飞行器在该参数所对应的方向上的振荡(约5~10次/秒);如果过小将导致飞行器难以控制。所以,您仍需要调节飞行器的俯仰、翻滚、飞行航向和垂直方向的感度,以便让您的飞行器拥有更好的飞行表现。我们建议您每次改动参数的10%至15%。
1) 基本感度
俯仰横滚:对于俯仰横滚的基础感度,您在打俯仰横滚杆之后马上松杆,飞行器应该会自动回到悬停状态。如果飞行器在回悬停状态过程中反应很柔软,或者说有较大延迟,那么请慢慢加大基础感度(每次10%-15%)直到松杆的瞬间出现振动的状态。此时再略微降低感度直到正好前述的振动现象消失。此时为合适感度,但飞行器改变姿态的速度变慢,您可按照姿态感度调整方法来调整姿态改变速度。
航向角:尾舵感度调整和普通锁尾陀螺的调试一样。如果想打杆后反应速度快些就加大感度,慢一些就降低感度。但多旋翼飞行器是靠桨翼旋转产生的反扭力来改变航向角,而反扭力的力度有限,因此过大的感度也不会引起像直升机机尾一样的震荡,而是会导致电机在启动和停止时反应过于强烈,从而影响其他方向的稳定。
垂直感度:垂直感度是否合适,可以观察:
1)油门在中位时飞行器是否可以锁定当前高度;
2)飞行器在飞航线时飞行高度不会大幅变化。您可以先慢慢增加该感度(每次10%)直至出现上下震荡或油门杆反应过于灵敏,然后再减小20%。此时为合适感度。
2) 姿态感度
姿态感度决定打杆时姿态响应速度的快慢,感度越大响应越快。增大感度以获得更干脆的姿态响应,放手悬停时候飞行器回平的速度也越快。但感度太大会造成您的控制感受过于僵硬,感度太低会造成您的控制感受过于柔和。
注意:
- 在第一次使用之前您必须点击默认值,并升级固件。
- 垂直方向上的感度对手动模式没有影响。
温馨提示:
- 如果您是新手,可以按如下方式调节基本参数:
1 参数每次调大10%直到您的多旋翼飞行器能够悬停或者出现轻微的抖动。
2 参数减小10%直到您的飞行器能够悬停,再减小10%。 - 如果基本参数设置与合适值相差太远,那么高级参数将不会起作用。
- 这里您可以利用远程调参通道在飞行过程中调节感度:
1 按照说明书中《安装和连线》章节中遥控接收机部分中的说明正确安装和设置;
2 在您想要调节的感度的远程调参选项中选择X2或X3。一个通道对应一个感度。
3 远程调节的范围从当前感度值的一半至当前感度值的两倍。 - 六旋翼飞行器的俯仰,横滚,俯仰姿态,横滚姿态的感度通常都要高于普通四旋翼飞行器。
2.高级参数
(Naza没有高级参数设置界面)
通常请您忽略这一步。默认值适用于绝大多数情况,因此我们不建议您更改这一栏的参数值。对于一些特殊的多旋翼飞行器,有经验的玩家可调节这些高级参数来获得更好的飞行性能。
1) 静态误差修正率
飞机静态情况下对误差补偿速率。
2) 速度阻尼
只在GPS模式起作用。
数值越大,松杆之后飞机的刹车会越厉害,但是同时在推满杆量时能达到的最大速度也会变小;越小会导致刹车变的很柔和,需要时间长,并且能达到的最大速度也相对较大。太大或者太小都可能导致GPS模式下的悬停不稳定。
3) 扰动感度
极端GPS情况下的特殊参数,请保持默认即可。


